简介
Michal Nand 在网站 HACKADAY.IO 上通过博文 Motoku Uprising Deep Neural Network 介绍了他利用卷积神经网络来帮助控制巡线智能车更加平稳快速运行的技术方案。特别是对神经网络的结构、训练、部署等方面进行了详细的介绍。
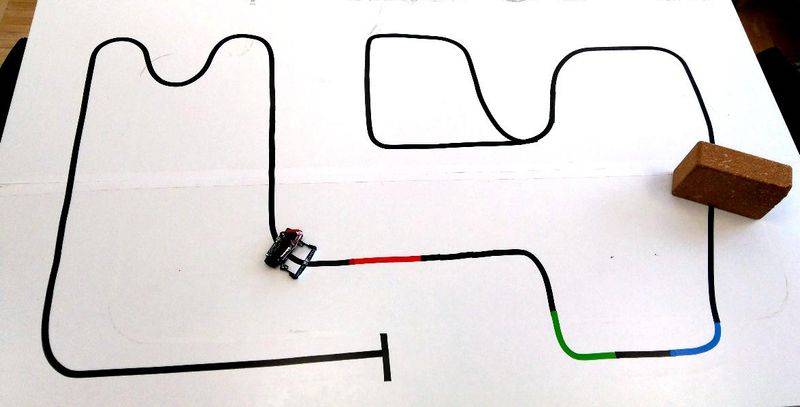
智能车的任务相对比较简单,就是在平面赛道上,沿着彩色导引线(大部分是黑色)从出发点运行到终点并折返到出发点。其中赛道上一段有一块砖头作为障碍物。
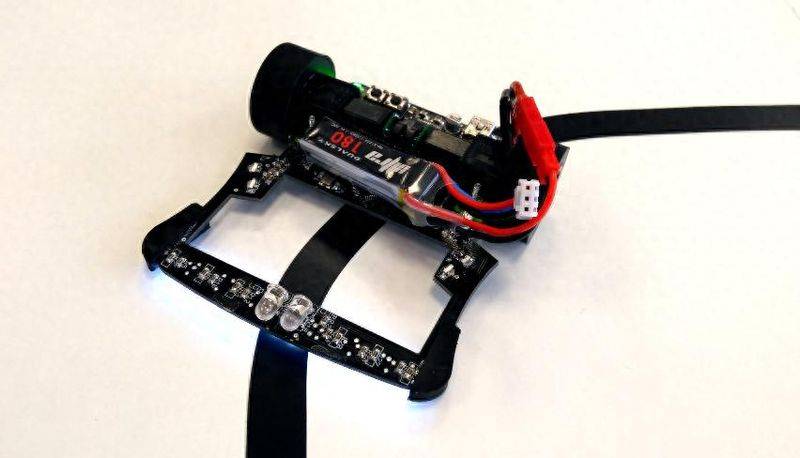
利用神经网络控制的巡线智能车
在作者的方案中,智能车运行大部分控制算法都采用了常规的PID、逻辑判断都算法。他使用了CNN根据车模运行过程中,通过传感器搜集到的二维路面数据来对赛道的种类进行分类判断,并通过调整车模速度来适应不同赛道的情况,达到又快又稳的目的。
机械结构1.硬件构成
这款智能车的硬件配置包括有:
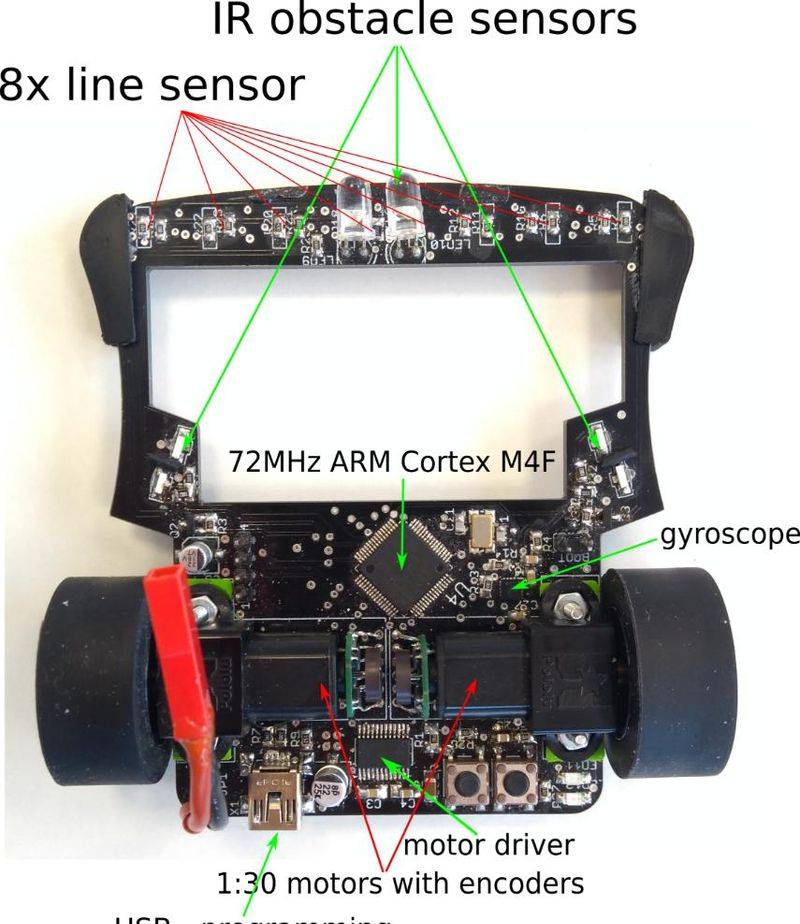
智能车的硬件构成
2. 组成器件
序号 种类 数量 型号 1 MCU 1 STM32F303 72MHz ARM Cortex M4F 2 电机驱动 1 TI DRIV8834 3 电机 2 1:30 PoloHu,具有磁编码器 4 轮胎 2 Pololu直径28mm 5 巡线传感器 8 540nm光电光电传感器+白色补光LED 6 红外传感器 3 表贴红外传感器+红外LED 7 惯性传感器 1 IMU LSM6DS0 陀螺仪+加速度计
控制算法1.控制调试界面
“磨刀不误砍柴工”。作者还是离OPENGL开发了用于调试的应用软件。可以通过界面:
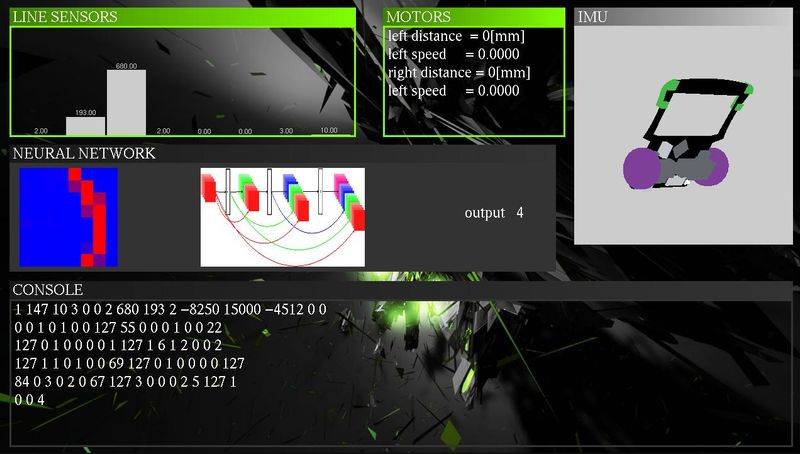
编程调试界面
2. 智能车控制软件要点
智能车软件的主要的功能和指标为:
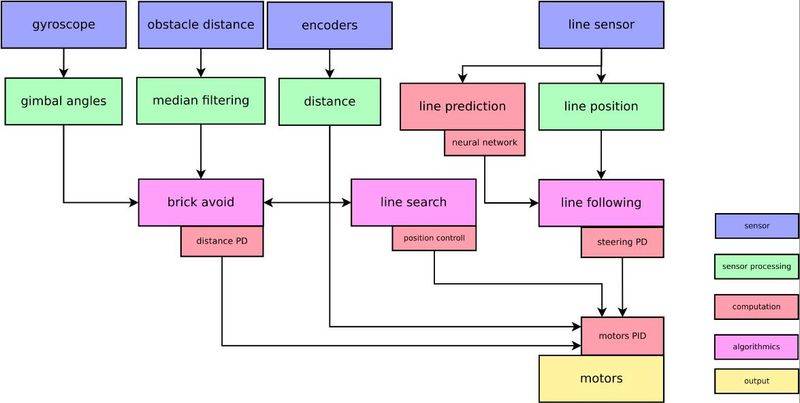
智能车的软件控制框架
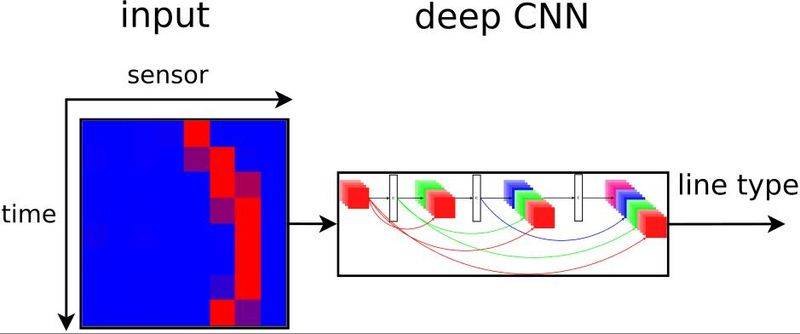
3. 神经网络用于引导线的预测
利用深度卷积神经网络完成对导引线的预测和分类:
神经网络结构图
训练样本采用人工生成的仿真数据训练神经网络:
输入训练数据样本
下图给出了DenseNet的网络结构。由于是部署在单片机STM303中允许,作者在网络的鲁棒性以及运行速度方面进行了权衡。网络运行频率为200Hz,所以网络执行时间必须小于5毫秒。为了达到这个目的,作者选择了DenseNet来提高计算效率,它比纯卷积神经网络使用更少的卷积核。
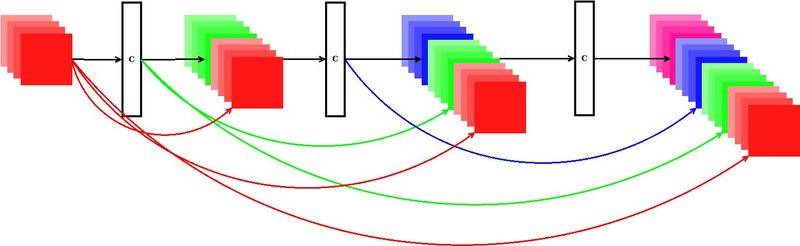
神经网络的结构
最终网络的识别准确率达到了95% 的精度。
4.网络最终结构
CNN神经网络的结果参数如下:
网络层 网络层类型 输入特征图张量尺寸 1 卷积3×3×4 8×8×1 2 MAX POOLING 2×2 8×8×4 3 稠密卷积3×3×4 4×4×4 4 稠密卷积3×3×4 4×4×8 5 全连接层 输出5 4×4×12

神经网络的各层结构参数
5.将网络部署到单片机中
为了能够在32位单片机中执行神经网络,对网络进行了如下的改动:

双内存缓存的模式
※ 结论
通过本文作者介绍的车模控制中的CNN网络的应用,了解了对于嵌入式单片机中使用神经网络的一半方法。
本文中的神经网络应用还属于辅助控制方面。也许通过部署更加强大算力的单片机,使用更加复杂的算法可以完成智能车自主学习的目标。这方面也为今年全国大学生智能汽车竞赛中的AI电磁组给出了一定的参考意义。
参考资料
Michal Nand: https://hackaday.io/michalkenshin