1. 直流无刷电机(BLDC)的本质特征与系统建模
直流无刷电机(Brushless DC Motor, BLDC)在工程实践中常被误认为是“去除了电刷的有刷电机”,这种理解掩盖了其本质的电磁物理特性。BLDC并非简单的结构替代,而是一种基于定子绕组电子换相、转子永磁体励磁的同步电机。其核心特征在于: 反电动势波形决定控制策略,而非供电方式 。这一判断依据直接决定了整个控制系统的设计范式。
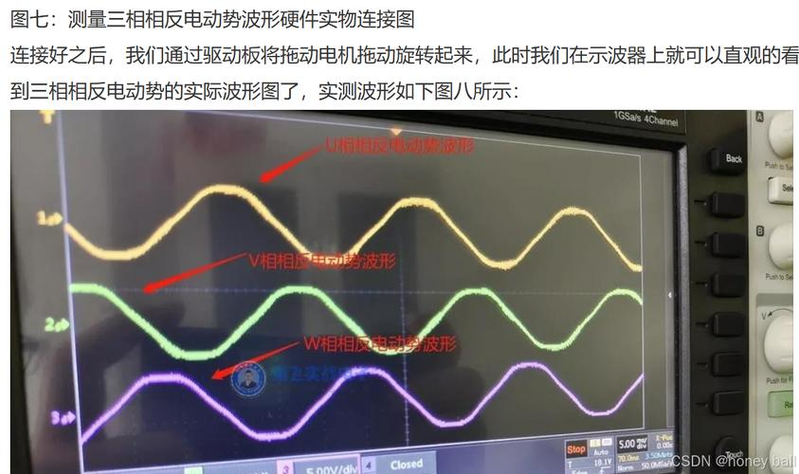
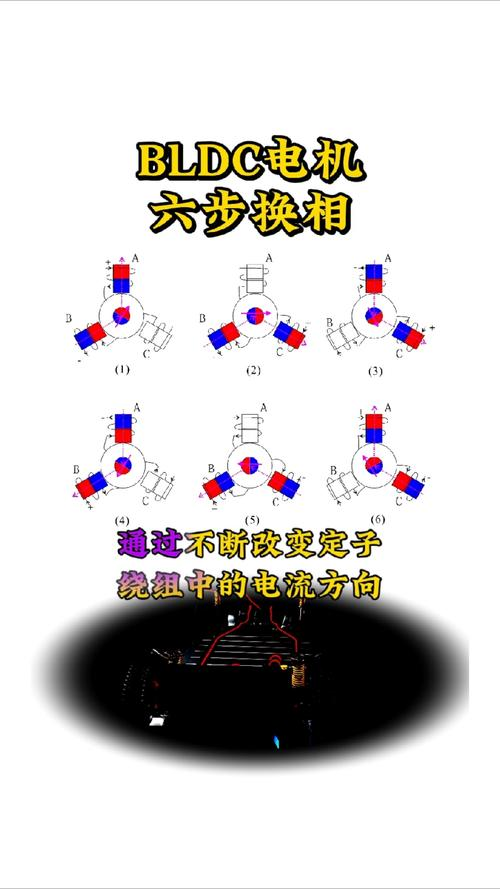
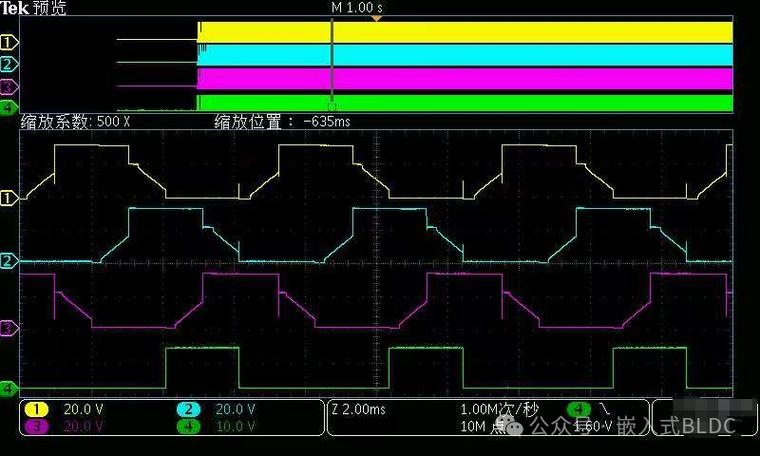
在实际工程选型中,必须首先通过实测或查阅电机规格书确认其反电动势(Back-EMF)波形。若空载旋转时任意两相端电压波形呈标准正弦形态,则该电机为永磁同步电机(PMSM);若呈现梯形波(平顶宽度接近120°电角度),则为典型方波BLDC电机。二者虽同属永磁同步类,但控制逻辑存在根本差异:PMSM要求三相电流严格正弦,需采用SVPWM(空间矢量脉宽调制)实现磁场定向控制(FOC);而BLDC可采用更简洁的六步换相(Six-Step Commutation),通过检测未导通相的反电动势过零点确定换相时刻。
从系统级视角看,一个完整的BLDC驱动系统由四个功能模块构成,各模块间存在严格的能量流与信息流耦合关系:
模块 核心功能 工程约束 典型器件
控制器
执行换相逻辑、速度/位置环PID计算、故障诊断、PWM生成
实时性要求高(μs级响应)、