好的,我们来详细介绍一下交流伺服电机的工作原理。它融合了电磁学、电机学和自动控制原理,核心思想在于实现“精准、快速、可控”的运动输出。以下是详细分解:
核心目标: 精确控制电机轴的位置、速度和/或转矩。
主要组成部分:
交流伺服电机本体:
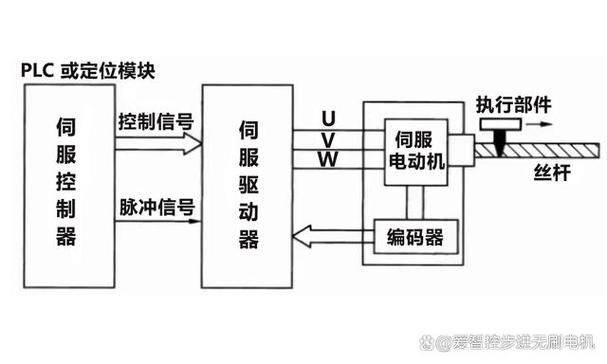
编码器(或旋转变压器等位置/速度传感器):
伺服驱动器:
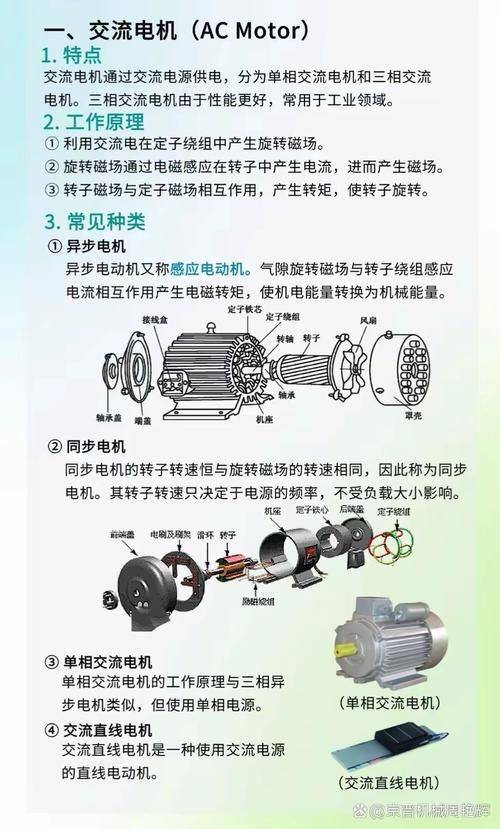
工作原理详解(以永磁同步伺服电机为主):
基本电磁原理(电机本体的基础):
闭环控制的核心思想:

磁场定向控制(FOC / 矢量控制) - 实现精准控制的关键算法:
解耦控制: d轴和q轴的电流在旋转坐标系下等效成了独立可控的直流分量。控制器(通常是多个PID调节器)可以分别独立地对 Id 和 Iq 进行精确控制:逆坐标变换: 经过PID控制器计算得到的修正d-q坐标系下的电压指令,需要通过逆Park变换和逆Clarke变换,转换回U-V-W三相坐标系下的电压指令信号。PWM生成: 这些三相电压指令通过空间矢量脉宽调制技术生成具体的开关信号(通常是PWM波),精确地控制逆变器上的功率开关管(IGBT/MOSFET)的通断时间和顺序,最终在电机端输出精确控制的三相交流电压和电流。
总结伺服系统的工作流程:
上位控制器发出目标指令(位置/速度/转矩)。编码器实时测量电机实际位置和速度。伺服驱动器计算目标与实际之间的误差。驱动器内部的控制器(按照位置环->速度环->电流环的结构,或仅转矩环)通过 FOC算法 分析误差:通过PWM技术驱动逆变器开关管,生成需要供给电机的三相变频变压交流电。电机定子绕组中产生受控的旋转磁场,拉动永磁转子转动。编码器再次检测新的位置/速度并反馈。整个闭环持续、高速地重复步骤3-7,不断计算误差、修正输出,最终使电机的实际输出(位置/速度/转矩)精确地、快速地、稳定地跟踪上位控制器的指令,直到误差被消除或维持在一个非常小的允许范围内。
交流伺服电机的关键特点和优势:
应用领域:
简单总结:
交流伺服电机(特别是永磁同步型)是一个高性能的执行器。它利用永磁体转子和电磁定子相互作用产生扭矩。其卓越性能的关键在于带有高精度位置反馈的闭环控制系统和先进的磁场定向控制算法(FOC)。该算法将复杂的交流电流解耦为独立的磁场分量和转矩分量(如同直流电机),通过快速调整供给电机的三相交流电(电压、频率、相位),使电机的实际输出(位置、速度、转矩)能够实时、精确、稳定地跟踪上位控制器的指令要求,从而实现高精度、高响应和高效率的运动控制。