《便携式直线一级倒立摆PPT课件.pptx》由会员分享,可在线阅读,更多相关《便携式直线一级倒立摆PPT课件.pptx(30页珍藏版)》请在知学网上搜索。
便携式直线一级倒立摆便携式直线一级倒立摆 深圳市元创兴科技有限公司深圳市元创兴科技有限公司先进教学实验室方案及设备专家先进教学实验室方案及设备专家先进教学实验室方案及设备专家先进教学实验室方案及设备专家概述概述 元创兴科技有限公司开发的便携式一级直线倒立摆采用一体化设计结构,开放的控制解决方案和模块化的实验平台,全方位满足本科生自动控制理论基础课程的教学和研究需要产品特点产品特点1 一体化结构:机械本体及控制器都放置在仪器箱中,体积小巧2 安装方便,系统可靠:使用时只需要打开箱盖,插上连接线,将摆杆固定杆竖起即可以使用,不需要其他安装工作3 系统可靠,信价比高:由于选择都是工业上产品部件,器件不裸露,所以可靠性高,适合本科学生重复使用,同时价格较低4 开放式平台,基础教学为主:采用开放式结构,以WINDOWS平台为主,适合教学与研究需要;为配合本科课程实验需要,开设了一系列针对该课程的实验内容适应的对象及专业适应的对象及专业本科阶段:1机械设计制造及其自动化2机械工程及其自动化3电气工程及其自动化4自动化研究生阶段:1控制理论与控制工程2控制工程实验环境要求实验环境要求硬件要求:硬件要求:1、Pentium II、Pentium III、AMD Athlon或者更高;2、内存至少256MB,推荐512MB 以上;3、至少有一个USB2.0接口;软件要求:软件要求:1、Microsoft Windows 98、Microsoft Windows 2000、Microsoft Windows XP;2、Microsoft Visual C+6.0;3、Matlab 6.5、Matlab7.0、Matlab R2011b;系统组成系统组成 便携式直线一级倒立摆实验系统总体结构如下图所示。

本实验系统的主体包括摆杆、小车、便携支架、导轨、直流伺服电机等主体、驱动器、电源和数据采集卡都置于实验箱内,实验箱通过一条USB数据线与上位机进行数据交换,另有一条线接220v交流电源便携支架为实验箱方便携带和安装而设计移动实验箱时,可以扭下便携支架和小车之间的旋钮,将支架和摆杆放倒在实验箱内,简单的接线可以使得本系统方便做课堂演示实验编码器编码器 2 摆杆编码器:选用是瑞普安华高(无锡)电子科技有限公司生产的光电式增量编码器编码器分辨率为500线,经数据采集卡四倍频后为2000线,也就是说摆杆旋转一周,编码器计数2000个摆杆旋转一周的角度为360度脉冲当量=360/20001 电机编码器(集成于电机尾部):分辨率为1000线,经过数据采集卡四倍频后为4000线,即电机转动一周,采集卡采集到4000个编码器计数脉冲电机皮带轮周长为0.1117465m,即电机转一周,小车走过0.1117465m的距离脉冲当量=0.1117465/4000伺服驱动器伺服驱动器 便携式倒立摆系统选用的伺服驱动器是西安铭朗电子科技有限公司生产的MLDS3810控制直流伺服驱动器该伺服驱动器主要性能如下:1.电源电压范围:12V-48V 2.最大连续输出电流:10A,最大峰值输出电流:20A 3.通过RS232实现PC控制、参数调整、在线调测 4.反馈元件:增量式编码器,四倍频解码 5.过流、过载、过压、欠压、高低温、位置误差超限、失控保护 6.控制模式有三种:速度模式、位置模式以及采用步进模式。
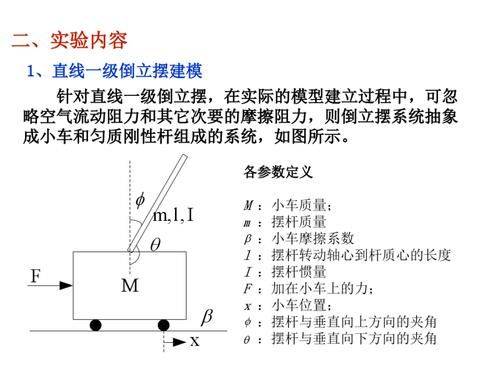
本系统采用速度模式系统工作原理系统工作原理 便携式直线一级倒立摆的工作原理是:数据采集卡采集到旋转编码器数据和电机尾部编码器数据,旋转编码器与摆杆同轴,电机与小车通过皮带连接,所以通过计算就可以得到摆杆的角位移以及小车位移,角位移差分得角速度,位移差分可得速度,然后根据自动控制中的各种理论转化的算法计算出控制量控制量由计算机通过USB数据线下发给伺服驱动器,由驱动器实现对电机控制,电机尾部编码器连接到驱动器形成闭环,从而可以实现摆杆直立不倒以及自摆起便携式直线一级倒立摆工作原理图 物理模型物理模型直线一级倒立摆模型 在忽略了空气阻力和各种摩擦之后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统并对此系统进行牛顿欧拉方法建模以得到系统状态空间方程和系统传递函数摆杆受力分析摆杆受力分析摆杆受力分析图 应用经典力学理论建立系统的动力学方程倒立摆实物控制中,系统的输出是摆杆的角度,受到控制的是小车的位置,以控制小车的位置来矫正摆杆的角度,使其尽可能为零,所以实物建模时,我们以角度为受控对象以摆杆角度为输出系统状态空间方程与系统传递函数系统状态空间方程与系统传递函数 以小车加速度作为输入的系统状态空间方程:以小车加速度为控制量,摆杆角度为被控对象,此时系统的传递函数为:通过系统状态空间方程进行现代控制器的设计通过系统传递函数进行经典控制器的设计物理参数物理参数1.摆杆质量m 0.0426kg 2.摆杆长度L 0.305m 3.摆杆转轴到质心长度l 0.152m 4.重力加速度g 9.81m/s2 元创兴便携式直线一级倒立摆实际系统的物理参数 将以上的物理参数带入系统数学模型中以得到精确的系统模型。

实验组成实验组成便携式倒立摆可以开展以下实验:实验1.运动控制基础实验(编码器原理及电机运动测试);实验2.根轨迹校正实验;(经典控制)实验3.频率响应校正实验;(经典控制)实验4.PID校正实验;(经典控制)实验5.状态空间极点配置控制实验;(现代控制)实验6.线性二次型最优控制实验(LQR);(现代控制)实验7.LQR控制(Bang_Bang自摆起)实验;(现代控制)实验8.LQR控制(能量自摆起)实验;(现代控制)实验9.模糊控制实验;(智能控制)实验10.模糊控制(Bang_Bang自摆起)实验;(智能控制)实验11.模糊控制(能量自摆起)实验;(智能控制)实验12.模糊PID校正实验;(智能控制)本实验系统主要以自动控制中的经典控制和现代控制理论为理论基础,但随着科学与工程研究的不断深入,控制理论不断发展,控制系统向智能控制系统的发展已成为一种趋势仿真实验仿真实验便携式直线一级倒立摆LQR控制仿真模型 系统响应系统响应 在给定小车位置干扰后,系统在3秒内可以达到新的平衡,小车平衡到指定的位置,摆杆保持静止下垂的状态实验者可以将得到的不同的反馈控制参数输入到仿真模型中进行仿真,并观察仿真结果。
便携式倒立摆安装包便携式倒立摆安装包 在开展实物控制实验之前必须确定计算机上已经成功安装了本公司提供的便携式倒立摆安装包,如果没有则根据元创兴便携倒立摆快速安装使用指南(Quck Install Guide)进行安装为保证安装的顺利进行,安装之前建议暂时关闭电脑安全类应用程序(例:360安全卫士,卡巴斯基等)1.在产品配套光盘里便携式倒立摆安装包SETUP.EXE运行SETUP.EXE进行安装,系统界面如下图按照默认选择直到安装完成USBUSB驱动安装驱动安装1.安装包安装完成以后,用USB数据线将计算机和便携式倒立摆系统连接起来计算机会发现一个新硬件,然后出现安装向导,选择从列表或指定位置安装(高级),点击下一步按钮,设置成如下:2.然后单击下一步,直至完成USBUSB驱动安装驱动安装3.如果出现无法继续硬件更新向导(如下图所示)时,则需要手动加载USB驱动程序4.在产品配套光盘里便携式倒立摆安装包USB驱动程序找到文件reinovohid.inf和reinovohid.sys,将这两个文件复制到路径C:WINDOWSsystem32drivers下拔插USB再次进行驱动程序的安装直至完成。
USBUSB驱动安装驱动安装5.打开设备管理器,如下所示6.看到USB人体学输入设备,就说明USB驱动安装成功实物控制实验实物控制实验 进入程序所在目录,双击MATLAB(Simulink)实时控制程序(reinovo.mdl),便携式直线一级倒立摆Simulink实时控制程序的主界面(Matlab 6.5版本)如下图所示Matlab 7.0Matlab 7.0版本(全英文版)版本(全英文版)运动控制基础实验(实验一运动控制基础实验(实验一 )本实验的目的是让实验者熟悉旋转编码器的基本原理,掌握利用计算机和数据采集卡对编码器进行数据采集的方法,以及利用计算机对电机进行控制的基本原理和方法,了解机电一体化的两个重要内容:传感技术和运动控制技术,以便顺利完成倒立摆的各项试验经典控制实验(实验二经典控制实验(实验二 实验三实验三 实验四)实验四)现代控制实验(实验五现代控制实验(实验五 实验六)实验六)BANG-BANGBANG-BANG自摆起实验(实验七)自摆起实验(实验七)能量自摆起实验(实验八)能量自摆起实验(实验八)模糊控制实验(实验九)模糊控制实验(实验九)VB6.0VB6.0版本控制程序版本控制程序 。